本节通过一个具体的一阶系统实例,探讨比例控制(Proportional Control)对系统稳定性、稳态误差及瞬态响应的影响,并引出控制工程中核心的“权衡” (Trade-off) 思想。
系统描述 (System Description)
-
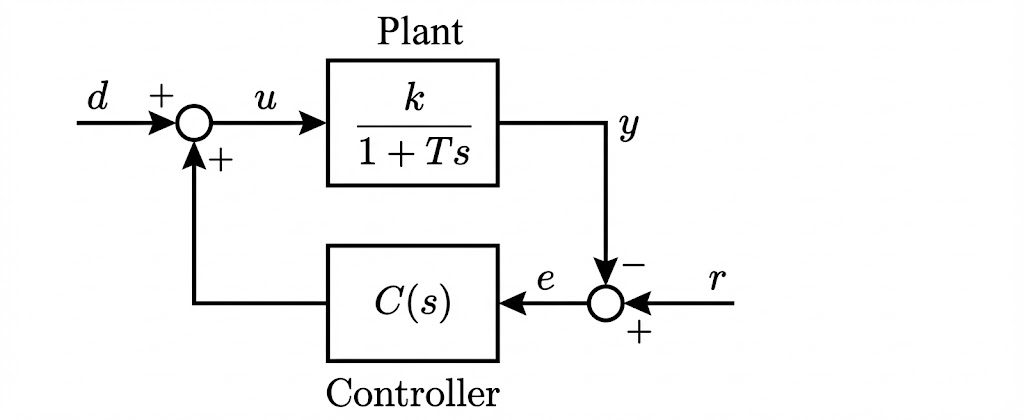
被控对象 (Plant):假设被控对象为一阶系统,其传递函数为:
其中 为直流增益, 为时间常数。通常假设 (即对象是开环稳定的)。
-
控制器 (Controller):采用最简单的比例控制 (Proportional Control),即:
其中 为可调的常数增益。
-
控制目标:
- 稳定性 (Stability):闭环系统必须稳定。
- 跟踪 (Tracking):输出 应尽可能接近参考信号 (即误差 小)。
- 抗扰 (Disturbance Rejection):抑制扰动 对输出的影响。
闭环特性分析
定义(灵敏度函数):系统从参考输入 到误差 的传递函数定义为灵敏度函数 :
定义(闭环传递函数):系统从参考输入 到输出 的传递函数为 (有时也记为 ,Complementary Sensitivity):
注:根据代数关系,恒有 。
我们将 重写为标准的一阶形式:
此处 为闭环时间常数。
性能与稳定性分析
定理(稳定性条件): 系统的极点由特征方程的分母决定:。 解得唯一的极点为:
为了保证系统稳定(极点位于左半平面,Let ),假设 ,则必须满足:
(若 均为正数,则系统始终稳定)。
分析(阶跃响应): 考察参考信号为单位阶跃信号 () 时的系统响应。
-
时域响应 :
-
稳态误差 :
或者直接由 计算:。
-
响应速度: 观察 处的切线斜率:
增益设计的权衡 (The Trade-off)
我们的设计目标通常是:
- 小的稳态误差 ()
- 快的响应速度 ()
从上述公式可以看出,增大控制器增益 可以同时实现这两个目标:
- 当 时,。
- 当 时,(响应变快)。
然而,增大 也会带来严重的副作用:
-
控制量过大 (Large Control Input): 在 时刻,控制输入 为:
如果 非常大,初始的控制信号会极大。
- 后果:物理执行机构(如电机、阀门)通常有饱和限制,过大的输入可能导致执行机构饱和(Saturation)甚至物理损坏。
-
未建模动态导致的失稳 (Instability due to Unmodeled Dynamics): 数学模型 通常只是真实物理对象的低频近似。真实系统往往包含高频极点(例如传感器延迟、柔性模态等)。
- 后果:虽然理论上对于一阶模型 再大也稳定,但在真实系统中,极高的增益 会放大高频信号,激发那些未被建模的高频极点,导致闭环系统不稳定。
- 注:这通常需要通过奈奎斯特 (Nyquist) 稳定性判据来深入分析。
结论:控制器的设计不仅是数学优化,更是一种妥协 (Compromise)。我们需要在“提高增益以获得更好性能”和“限制增益以保证安全与鲁棒性”之间找到平衡点。