标准反馈连接 (Standard Feedback Connection)
控制系统:下图为频域空间中的控制系统示意图,其中 和 表示频域空间的传递函数(关于 的有理分式)。即 表示 , 表示 。
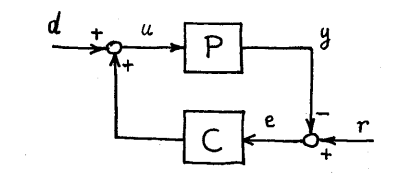
反馈结构:考虑两个传递函数为 (Plant, 被控对象) 和 (Controller, 控制器) 的线性 SISO 系统的反馈连接。根据方框图,系统方程可写作(假设零初始条件):
- : 作用在被控对象上的扰动 (disturbance)
- : 被控对象的输入信号 (input)
- : 被控对象的输出信号 (output)
- : 参考信号 (reference signal)
- : 跟踪误差 (tracking error),
- 等均表示对应变量的拉普拉斯变换
证明:被控对象的输入 由扰动 和控制器输出 叠加而成
误差 定义为参考信号 与输出 () 之差。
将上述整理后的两式写成矩阵形式:
只有在频域空间中才能被写为这样简单的代数系统,在时域中 都是复杂的 ODE。
传递函数:为了求解内部信号 和 ,我们需要对系数矩阵求逆:
计算 矩阵的逆(注意 SISO 系统中 ):
反馈连接的稳定性:被控对象 本身往往是不稳定的(例如战斗机、磁悬浮列车),我们设计控制系统的目的就是用控制器 去把一个不稳定的 变稳定
稳定性分析与零极点对消
当我们把整个控制系统当作一个整体时,我们可能会忽略掉 和 的一些内部作用,而导致系统爆炸。比如 是一个高压锅, 是阀门,正常运作时 能检测到所有压力升高的信号从而打开阀门放气,但如果 的某个零点导致了其忽视了 的某个爆炸极点,这样控制系统就失效了。
定义(零极点对消):若复数 同时满足以下情况,则称在乘积 处发生了 点的零极点对消:
- 是 的极点(或 的极点);
- 是 的零点(或 的零点)。
直观理解:【 极点 - 零点】表示对象要爆炸,控制器在装瞎;【 零点 - 极点】系统对输入不理会,输出端毫无变化时,控制器无限加强。
定义(对消的稳定性):若 (左半平面),称该对消是稳定的。若 (如在虚轴或右半平面),称该对消是不稳定的。
直观理解:【左半平面对消】表示系统本身是稳定的,就算装瞎不去控制它,它也不会爆炸;【右半平面对消】表示系统本身就不稳定,还装瞎不去控制,就会直接爆炸。
定理(稳定性充要条件): 和 的反馈连接是稳定的,当且仅当满足以下两个条件:
- 灵敏度函数稳定: 是稳定的。
- 无不稳定对消:乘积 中不存在不稳定的零极点对消 (pole-zero cancellation)。
证明:设 和 的既约分式表示(互质多项式之比)为:
闭环传递函数矩阵的四个元素在通分后的公共分母(即系统的特征多项式)为:
四个传递函数具体形式为:
必要性 ():若系统稳定,则四个 均稳定。条件 1 显然成立,因为 即为 。假设条件 2 不成立,即存在不稳定对消点 。不妨设 是 的极点 () 且是 的零点 ()。 此时特征多项式 ,即 是特征方程的根。 考查 :由于 是既约的,;同理 既约 implies 。 因此, 的分子在 处不为 0,而分母为 0。这意味着 有一个不稳定的极点 ,系统不稳定。这与假设矛盾,故条件 2 必须成立。
充分性 ():若条件 1 和 2 成立。由条件 1, 稳定,说明 中所有的不稳定根(若存在)必须被 中的零点所抵消。假设 仍有一个不稳定根 。由上一步知,必须有 。若 :代入 的方程,得 。因 既约,,故必有 。这构成了“ 极点与 零点”的不稳定对消,与条件 2 矛盾。若 :同理可推得 ,构成“ 极点与 零点”的不稳定对消,与条件 2 矛盾。
因此, 不可能存在不稳定根。特征多项式稳定意味着矩阵中所有传递函数均稳定。
例 1 (稳定对消): 有极点 , 有零点 。在 处存在对消。由于 ,这是一个稳定的对消。虽然 本身在 处有极点(临界稳定),但对消本身是良态的。
例 2 (不稳定对消): 的极点为 , 的零点为 。在 和 处存在对消。由于这些点不在左半平面,属于不稳定的零极点对消。因此,该反馈连接不稳定。
例 3 (不稳定组件构成稳定系统):。虽然 和 都不稳定(极点在 ),但在 中没有发生零极点对消( 的零点是 ,极点是 ; 无零点,极点是 )。分母 的根实部为负,故该传递函数稳定。反馈连接是稳定的。
术语与控制目标 (Terminology & Goals)
- 环路增益 (Loop Gain):
- 灵敏度函数 (Sensitivity Function):
- 控制目标:我们需要在存在扰动 的情况下实现良好的跟踪(即 ),使误差 尽可能小。误差方程可由之前的矩阵方程导出:
- 目标:使 尽可能小(从而抑制扰动和减小跟踪误差)。
- 约束:减小 的同时不能破坏闭环系统的稳定性。
注 (状态空间解释):如果 和 分别是最小实现 (minimal realization) 的被控对象和控制器,那么反馈系统通常也是最小实现的。在此前提下,仅需检查 的稳定性即可推断系统的内部稳定性。