预备知识:电路建模物理基础
基本变量与符号:我们主要关注以下两个随时间 变化的实值函数:
- 电流 (Current) :电荷流动的速率,单位为安培 (A)。
- 电压 (Voltage) :两点间的电势差,单位为伏特 (V)。
元件的伏安特性 (欧姆定律):电路元件的物理特性决定了电压与电流之间的代数或微分关系。
其中 为电阻值。
电感 Inductor:电感是储存磁场能量的元件,具有“惯性”,阻碍电流的变化。其两端电压与流过电流的变化率成正比:
其中 为电感值。
由于 ,即 ,在状态空间模型中,通常选取流过电感的电流作为状态变量,以便通过电压来描述其导数。
电容 Capacitor:电容是储存电场能量的元件。流过电容的电流与电容两端电压的变化率成正比:
其中 为电容值。
由于 ,即 ,在状态空间模型中,通常选取电容两端的电压作为状态变量,以便通过电流来描述其导数。
基尔霍夫电流定律, KCL:对于电路中的任意节点 (Node),流入该节点的电流之和等于流出该节点的电流之和。
基尔霍夫电压定律, KVL:对于电路中的任意闭合回路 (Loop),沿回路绕行一周,电压升高的代数和等于电压降低的代数和。
例子:电路系统的状态空间模型
问题描述:考虑一个包含电阻、电感、电容的电路网络。
- 输入 (Inputs):电压源 和 。
- 输出 (Outputs):电流 和电压 。
- 元件参数: (电阻), (电感), (电容),假设所有参数均为正值 ()。
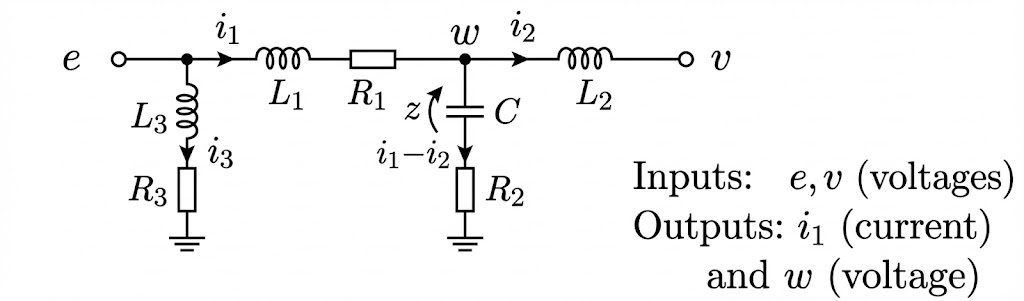
状态变量:选择电感中的电流和电容两端的电压作为状态变量(除非存在代数依赖,本例中不存在)。 定义状态向量 、输入向量 和输出向量 如下:
其中 是电容 两端的电压, 分别为流过各支路的电流。
物理定律:根据基尔霍夫定律 (Kirchhoff's Laws) 及元件的伏安特性方程:
同时,输出方程由 的定义及代数关系 给出。
系统矩阵:将上述方程组写成标准状态空间形式 ,,可得矩阵:
稳定性分析(特征多项式角度):观察矩阵 的块对角结构 (Block Diagonal Structure),其特征多项式 可分解为两个块的特征多项式之积:
其中系数为:
由于电路参数均为正值,显见 且易证 。根据 Routh Test 可知矩阵 是稳定的 (Stable)。
极小性分析 (Minimality):计算传递函数 时,发现矩阵 的最后一行/列、矩阵 的最后一行以及矩阵 的最后一列均对输入输出关系无贡献(Irrelevant)。
- 物理意义:状态 ( 支路)既不影响输出 ,也不影响其他状态变量。尽管输入 驱动了 ,但该支路与其他部分完全解耦。
- 数学结论:包含 的原 4 阶系统不是极小实现 (Not Minimal)。消除 后得到的 3 阶子系统(状态为 )是极小实现。
注:极小性对应于系统的能控性 (Controllability) 和能观性 (Observability)。本例中, 这一状态虽然可能是能控的(受 影响),但对 是不可观的,或者是与其他状态解耦而变得多余。若令 ,系统可能会变得不稳定,具体需进一步分析。
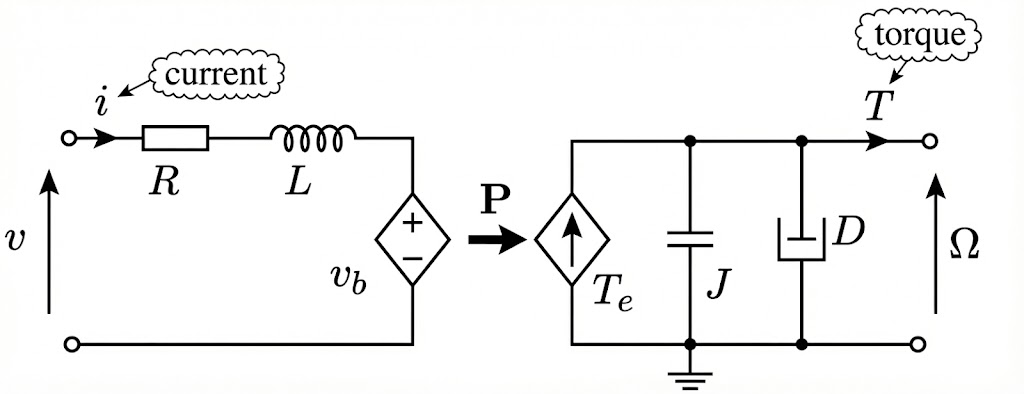
例子:DC Motor